Занятие в Точке Роста
Состав «Конструктора программируемых моделей инженерных систем» подобран таким образом, чтобы дать учащимся возможность конструировать решения, выполняющие вполне реальные задачи различной сложности, например, исследование местности, манипулирование объектами, транспортировка объектов, патрулирование территорий и многое другое. Применение данного образовательного робототехнического комплекта позволит учащимся познакомиться с основами робототехники, электроники и микропроцессорной техники, принципами автономной навигации мобильных роботов и системами управления роботами.
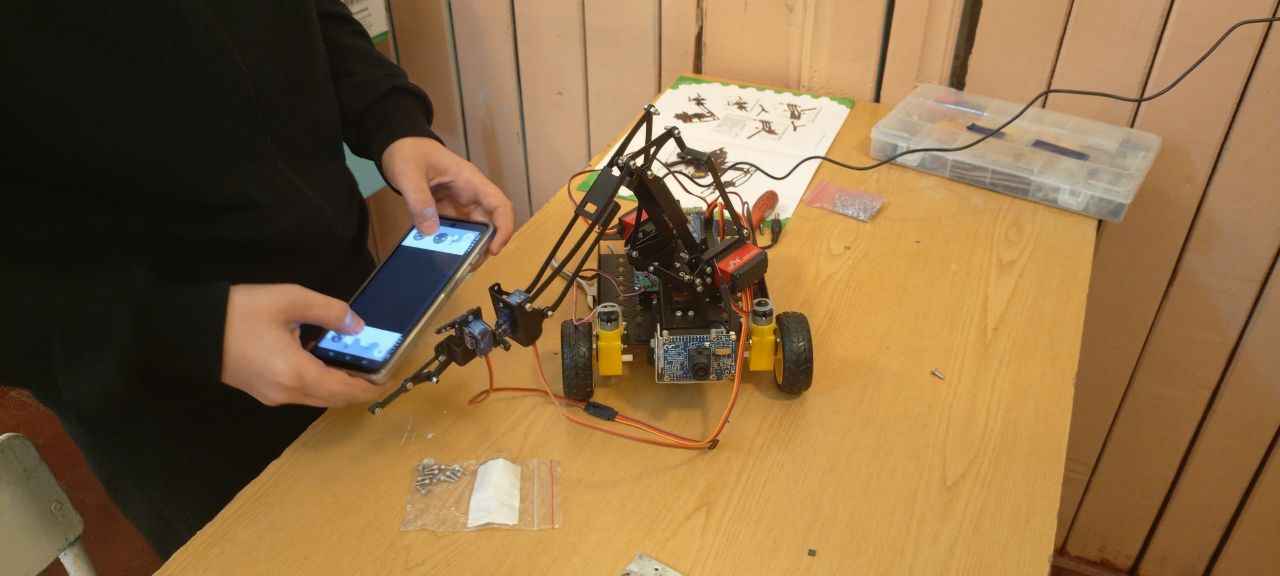
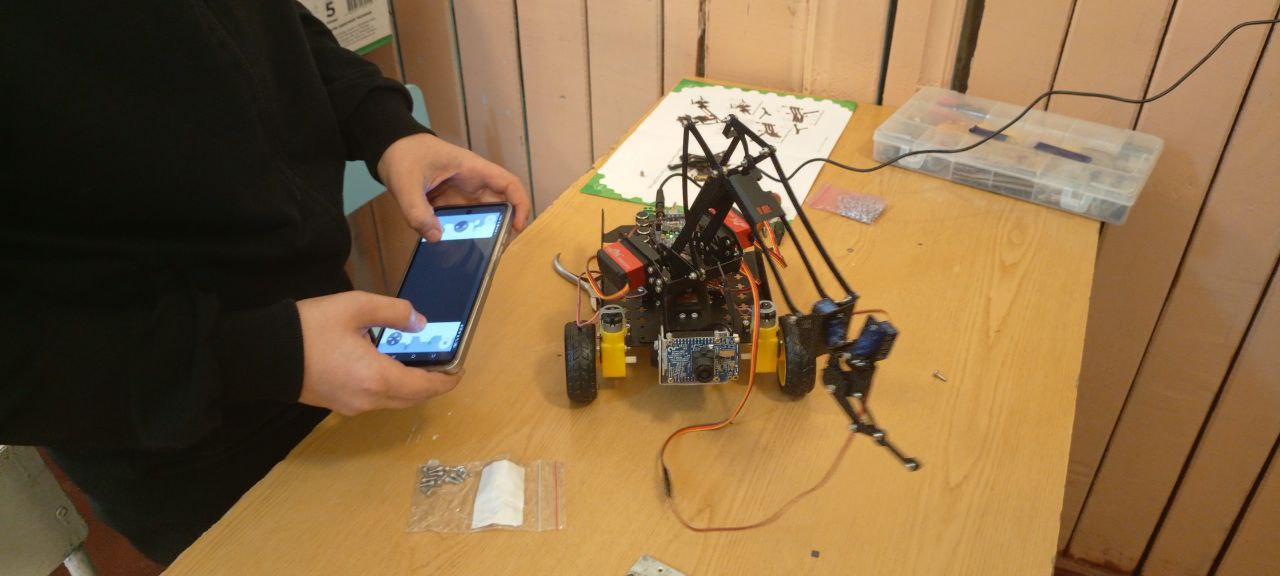
На занятии на мобильную платформу установили модуль машинного зрения TrackingCamV3, c помощью которого можно управлять мобильной платформой и манипулятором используя смартфон, с установленным на нём приложеним RobotCamera от компании "Прикладная робототехника". При управлении манипулятором выявились неточности при сборке конструкции, которые будем устранять на следующих занятиях. Не верно были установлены крайнии положения сервоприводов, так же были ошибки при сборке захвата, но в этом и кроется вся прелесть разработки - выявление проблемы, построение путей решения и устранение припятствий на пути к достижению результата, за котором следует ликование и короткое удовлетворение. Ведь следом за реализацией одной идеи возникает пять новых!!!